

Nel 2008, anno delle Olimpiadi di Pechino, ci fu una piccola nazione che nonostante i duri allenamenti, portati avanti per molti mesi sotto lo sguardo di una moltitudine di persone, non riuscì a qualificarsi per far partecipare alle gare il suo singolo atleta. Il nome di questo paese? In realtà non lo conosciamo. Ma l’appellativo di costui ci è giunto attraverso la fama imperitura: QWOP, come il suono che fa una scarpa da ginnastica quando colpisce il tartan rossiccio, pavimento per eccellenza nelle discipline dell’atletica leggera; no, QWOP: Quite Worthy Operative Person, acronimo soltanto parzialmente suggestivo dell’intento procedurale originario; no, QWOP: i primi due, e gli ultimi due tasti sulla prima riga della tastiera. Un chiaro rifermento al particolare stile deambulatorio dell’individuo in questione, la cui corsa, idealmente, era la risultanza di una serie d’impulsi (avanti, indietro, sopra sotto) inviati separatamente alle due gambe perfettamente capaci di condurlo nell’Olimpo degli atleti generazionali. Se soltanto non fosse stato così… Terribilmente scoordinato. Capite di cosa sto parlando? È il celebre giochino da browser, che spopolò nelle classi e negli uffici poco prima della rivoluzione smartphone, in cui la sfida principale per l’utente era riuscire a padroneggiare un sistema di controllo tutt’altro che semplice, efficiente o sensato. Eppure, così perfetto, da un certo punto di vista: poiché permetteva un controllo diretto dei muscoli dell’omino, ovvero la perfetta sovrapposizione tra le nostre dita alle sue scattanti caviglie. Tra un capitombolo e l’altro. Mentre nel più famoso gioco di corsa fino ad allora, Track & Field della Konami (Hyper Olympic, 1983) tutto quello che veniva chiesto in termini d’interfaccia per andare più velocemente era premere molto rapidamente il pulsante. Al giorno d’oggi, nessuno si sognerebbe di definirla un’esperienza in qualsivoglia modo edificante. Perché, dunque, dovremmo modellare l’imminente sport della corsa tra robot giganti sulla base di una tale attività, banale quanto ripetitiva?
Già, imminente. Qualcuno tra voi potrebbe, forse, aver assistito al cosiddetto “scontro di wrestling” tra i due sistemi meccanici da combattimento, costruiti rispettivamente da Stati Uniti e Giappone, organizzato lo scorso ottobre grazie alla campagna pubblicitaria della Megabots, piccola azienda finanziata online. Un’esperienza che in molti hanno definito deludente, per il semplice fatto che i mech in questione erano lenti, goffi e l’intera azione appariva di conseguenza basata su un rudimentale copione. Tanto che dopo un simile exploit, comprensibilmente, molti sarebbero propensi a lasciare lo sviluppo dei sistemi robotici semoventi a mega-zaibatsu con i fondi pressoché illimitati, come la Boston Dynamics passata dal governo statunitense a Google, riprendendo una dinamica commerciale anticipata in pieno dal movimento letterario cyberpunk. Eppure, sono possibili anche vie di mezzo. Come l’ultima creazione di Furrion, multinazionale americana attiva nel campo del lusso dal 2004, che sembra al tempo stesso riconfermare, e smentire, i nostri preconcetti frutto di delusioni pregresse. Come sempre avviene nelle storie di robot, ad ogni modo, sarebbe riduttivo attribuire il Prosthesis mostrato per la prima volta allo scorso CES (robot dal nome, permettetemi di dirlo, poco ispirato) alle macchinazioni di un’intera compagnia senza volto, quando in effetti rappresenta il sogno di vecchia data, e il frutto di un lungo percorso personale, di Jonathan Tippett, l’uomo che parla finalmente per più di un minuto al vasto pubblico nella breve intervista realizzata dal canale Tested, durante una sua dimostrazione alla Maker Faire di San Francisco. Il che è senz’altro utile, dopo una serie di video di presentazione che iniziavano a ricordare in maniera preoccupante, con il loro stile eccessivamente enfatico, le pubblicità della Megabots. Quando qui di sostanza ce n’è eccome, soprattutto nel meccanismo alla base dell’intera faccenda, inaugurato dall’inventore dopo 10 anni di ricerca e sviluppo, con quella che lui definì il progetto Alpha Leg. Ipotesi: riuscire a controllare un arto metallico lungo svariati metri grazie ai movimenti diretti del proprio corpo. Esecuzione: difficile, anzi difficilissima…
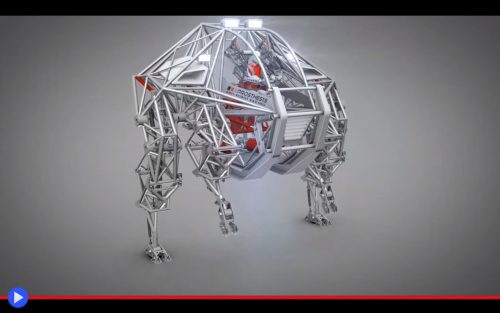
La vera svolta arrivò quindi nel 2005, con il coinvolgimento della Furrion e la costituzione, all’interno di quest’ultima, di un dipartimento di robotica guidato da Tippet, attraverso un’opera di convincimento che risulta difficile da immaginare a distanza di tempo. Con il risultato che ingenti fondi hanno iniziato a fluire, direttamente dalla compagnia famosa per i suoi camper costruiti su misura ed oggetti tecnologici a caro prezzo, direttamente nell’officina di chi, sopra ogni altra cosa, desiderava diventare il primo Koji Kabuto o Amuro Ray. È in fin dei conti del tutto inevitabile, nel nostro repertorio di paragoni, non fare diretto riferimento all’estetica di un certo tipo di letteratura fumettistica e cartoni animati tipici del Giappone, in cui il pilota del robo-eroe di turno, tanto spesso, controllava la sua leggendaria armatura sovradimensionata col movimento diretto del suo corpo. Il che ci riporta, assieme alla prova deambulatoria non proprio eccellente di Tippet alla Maker Faire, a quel giochino di nome QWOP, in cui la sfida stava proprio nel trarre dai propri input una sequenza destra-sinistra in qualche modo valida per qualificarsi alle Olimpiadi di Pechino. Con un passo ulteriore compiuto verso l’impossibilità: il fatto che il corpo, virtuale o meccanico a seconda dei casi, sia questa volta di tipo assolutamente non-umano, ovvero un quadrupede, per di più con le ginocchia invertite al fine d’incrementare la stabilità funzionale.
Immaginate, ora, la difficoltà a cui può andare incontro colui che tenti di muovere braccia e gambe come un gorilla, all’interno della “gabbia” di comando del mezzo, in modo che gli arti corrispondenti dello stesso producano un movimento lineare, o ancor più ambiziosamente, riescano a curvare o balzare al di là della siepe. Una problematica talmente estensiva che lo stesso Tippet, nonostante le centinaia di ore di pratica, ammette e dimostra chiaramente di non aver ancora risolto e che potrebbe ipoteticamente costituire proprio l’aspetto più agonistico del futuro “sport” da lui teorizzato. Il che non significa, d’altra parte, che una versione perfezionata del Prosthesis possa trovare applicazione nel mondo reale, ad esempio nel campo dei soccorsi in caso di disastro naturale, o perché no, quello bellico, come del resto teorizzato da innumerevoli generazioni di opere d’intrattenimento. Il punto è che un mech basato su gestualità preconfigurate o sub-routine, per quanto sofisticato, potrà sempre incontrare una circostanza d’impiego troppo complessa per essere gestita dal suo pilota. Il quale, metaforicamente parlando, non potrebbe far altro che schiacciare più velocemente il suo tasto di corsa invano, mentre un robo-QWOP sarebbe in grado di alzare semplicemente un po’ di più la gamba, e scavalcarlo. A patto, inutile dirlo, che alla guida del secondo si trovi un pilota dall’esperienza superiore all’umano.
Dal punto di vista prestazionale, il robot di Furrion non ha nulla da invidiare ai massimi esponenti della sua categoria (numero di sistemi esobionici per correre maratone al mondo: 1…Forse 2?) con una mega batteria al litio da 96Vx20kWh, probabilmente la stessa presente nei camper super-tecnologici della serie Elysium, in grado di sviluppare una potenza di 225hp. La quale dovrebbe tradursi, in condizioni ideali, in una velocità massima di circa 30 Km/h, non propriamente eccelsa ma comunque superiore a quella raggiungibile da un’umano appiedato. Davvero niente male, per un meccanismo alto 4,2 metri e dal peso complessivo di tre tonnellate e mezzo. Ora, se soltanto il suo creatore, almeno, riuscisse a imparare a guidarlo!
Sarà evidente a questo punto che ci troviamo di fronte a un qualcosa che va visto non tanto per ciò che è adesso, ciondolante attrezzo appena in grado di reggersi in piedi (talvolta) ma per quello che potrebbe diventare a breve: la realizzazione, completa a tutti gli effetti, del sogno di trasformarsi temporaneamente in qualcosa di più grande, più forte e capace d’imprese al di sopra dell’umano. Ovvero l’ascesa ad uno stato ideale di trasfigurazione, in grado di modificare le imprese che possiamo ragionevolmente aspettarci da un singolo dotato di profonda dedizione, più che mai necessaria per apprendere la metodologia di controllo di questo contro-intuitivo marchingegno, scaturito dall’inferno delle interfacce tecnologia-uomo.
E se alla fine ne sarà valsa la pena, questo soltanto il tempo potrà dimostrarlo. Di certo, si tratterà di un significativo passo in avanti rispetto ai noiosi cingoli impiegati nella “battaglia” dei Megabots.